
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Drone Navigation Deception Technology
Navigation deception targeting drones generally refers to the use of certain technical means to inject artificially set false threat navigation information into illegal drones, causing the drone's own satellite navigation system to incorrectly determine its position, and thus make incorrect route planning and flight control, thereby achieving the purpose of driving away the drone or forced landing at a designated location. Due to the fact that mainstream drones currently use the Global Satellite Navigation System (GNSS) as their main source of navigation information, navigation deception technology can almost affect all drones, especially civilian drones, and has good applicability. In practical use, the ground based drone navigation guidance equipment generally emits pseudo navigation signals that have a certain similarity to the real drone GNSS signal, forcing relevant users to receive and calculate such pseudo navigation signals at the receiving terminal, thus making the drone obtain false position, speed, and time information under concealed conditions and unable to effectively detect it. It should be pointed out that navigation deception is different from navigation interference. Navigation suppression interference generally uses high-power jammers to transmit different types of suppression signals, making the target receiver unable to receive normal navigation signals, and users unable to obtain navigation, positioning, and timing results, resulting in the unavailability of the navigation system. Due to the fact that navigation deception often does not require too strong transmission power, has good concealment, and can guide relevant users to navigate in the wrong way to a certain extent, this also makes navigation deception have good application effects in practice.


Currently, there are two main navigation deception technologies for drones:
1) Forwarding deception
As the name suggests, forward deception refers to placing a GNSS receiver around the target to be deceived, storing and forwarding the real GNSS signal to the target to achieve the effect of deception. Generally, due to the inevitable occurrence of signal arrival delays during signal reception, storage, processing, and forwarding, forwarding interference can be divided into direct forwarding deception and delayed forwarding deception based on the presence of human delay in the delay. Due to the fact that forward deception jamming directly forwards the real signal, it means that as long as the current signal can be received, deception can be carried out. Therefore, there is no need to know the structure of the signal pseudocode in advance, especially without understanding the specific implementation details of the GPS M (Y) code. Therefore, military GPS signals can be directly deceived. However, due to the fact that the delay of the forwarded deception signal reaching the receiver is always greater than the delay of the real signal arriving. Due to the inability to change the pseudo code structure and only the pseudo distance measurement value during the deception process, the control flexibility of simultaneous forward deception interference is relatively poor, often requiring more complex forward delay control strategies, and also having certain limitations on the deployment location of forwarding devices. For receivers that have already achieved stable tracking of GPS signals, the forward deception jamming is only effective when the delay between the forward signal and the direct signal at the phase center of the target receiver antenna is less than one chip due to its pseudo code phase clock lagging behind the real signal. In addition, research has shown that due to the fact that GPS receivers typically receive multiple satellite signals (usually greater than 10 channels), it is often necessary to receive and forward multiple satellite signals during deception. However, in practice, if a single station and single antenna method is used for forwarding, it is often impossible to simultaneously forward more than four channels (excluding four channels) of satellite signals, and multiple signals need to be forwarded at one forwarding station, Often resulting in a large volume of forwarding stations, forwarding spoofing signals are also easily detected. Therefore, the use of forward spoofing is often limited in practice.


(2) Generative deception
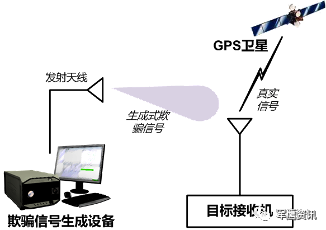
The basic principle of generative deception is to use deception devices to calculate in real-time the necessary parameters such as code phase delay, carrier Doppler, navigation message, etc. of the GNSS signal that the user needs to receive at the predetermined expected user position. Based on this, a false GNSS signal is generated at that point and radiated to the deception object through the transmitting antenna, masking the true GNSS signal with the power advantage of the false signal, Make it gradually track and capture the specified pseudo code phase and carrier Doppler of the deception signal, so that the target to be deceived can obtain incorrect pseudo range measurement values, and then calculate the incorrect position information, ultimately achieving the purpose of deception. The basic principle of this method is shown in the following figure:
Generative deception requires a complete understanding of the data and frequency structure of GNSS signals, such as pseudo code structures, navigation messages, etc., making it difficult to implement generative deception on P (Y) code signals. Due to the fact that generative deception jamming utilizes its own device to generate deception signals and does not rely on the GNSS system, the deception party can freely determine the navigation message and signal transmission time, which allows the deception signal to reach the receiver either lagging or ahead of the real signal. So generative interference can deceive the target receiver through various means such as changing the arrival experimental measurement values and tampering with satellite ephemeris/almanacs. In addition, as GNSS signals are actually direct sequence spread spectrum signals that repeat at a certain code period, research has shown that generative deception signals can automatically match the code phase with the real signal within the longest pseudo code period (1ms for GPS L1 signals), and pull the receiver pseudo code tracking loop to track the deception signal through a slightly higher power than the real signal. At the same time, due to the cyclic repetition characteristic of the pseudo code in the deception signal, if the deception is not successful within one pseudo code cycle, the deception signal can also automatically implement traction in the next pseudo code cycle until the target receiver is successfully guided. Once the deception signal successfully pulls the pseudo code tracking loop of the target receiver, the interfering party can control the timing and positioning results of the target receiver by adjusting the pseudo code phase of the transmitted deception signal, thereby achieving the goal of deceiving the target receiver. Therefore, this method does not have high requirements for the current state of the receiver. It can deceive both the receiver in the capture state and the receiver in the steady-state tracking state. Therefore, the practicality of generative deception is often stronger.
Due to the deep application of satellite navigation systems in various aspects of social life and military applications, satellite navigation receiving terminals receiving false signals and obtaining incorrect timing and positioning results may lead to catastrophic consequences. Therefore, the number of drone countermeasures using navigation deception technology is constantly increasing. On December 4, 2011, Iranian air defense forces claimed that they had used deception technology to capture a US "RQ-170" unmanned reconnaissance aircraft along the eastern border of the country. If this report is true, it will be the first application of navigation deception technology in unmanned aerial vehicle countermeasures. According to media reports, as a major country in electronic warfare technology and equipment, Russia is highly likely to have extensively used deception technology targeting GPS in recent years. According to C4ADS, a non-profit organization in the United States, there have been nearly 10000 different GPS deception incidents in Russia in recent years, especially when Russian President Putin visits sensitive areas, deceptive GPS signals will appear around them. In addition, the organization reported that in Moscow, especially near the Kremlin, tourists have repeatedly found their location designated as an airport 32km away. This approach by Russia is widely regarded as a defensive measure to avoid being attacked by NATO GPS guided weapons. Analysis suggests that the Russian military has been able to repeatedly thwart drone cluster attacks targeting its military bases in Syria, possibly due to the use of partial GPS deception technology.